
As I mentioned in the previous article, I’ll use MCP2515 CAN controller for inter-module communication (initially, at least) for the Analog3 Project.
Datasheet of this device is available at the product page.
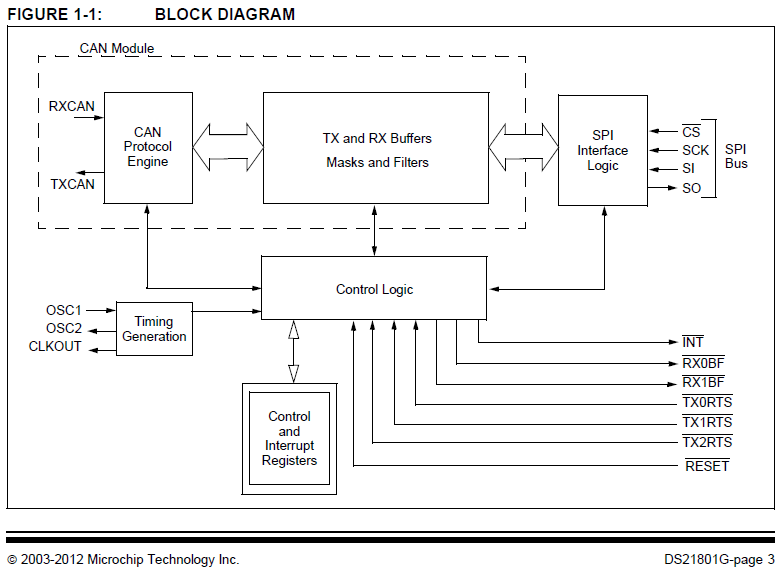
MCP2515 consists of CAN protocol engine, data buffers, controller, and SPI interface as illustrated in the picture below.
 You need to attach a processor to make this device functional. In early phase of the project, I’m thinking of using a Raspberry Pi as the Master Of Modules (mom) and Arduino’s for dummy synthesizer modules. Arduino is not a realistic solution for Analog3 both in terms of cost and performance. So, I’m thinking of implementing a common synthesizer module driver based on PSoC or CAN enabled AVR. MCP2551 is CAN transceiver.
You need to attach a processor to make this device functional. In early phase of the project, I’m thinking of using a Raspberry Pi as the Master Of Modules (mom) and Arduino’s for dummy synthesizer modules. Arduino is not a realistic solution for Analog3 both in terms of cost and performance. So, I’m thinking of implementing a common synthesizer module driver based on PSoC or CAN enabled AVR. MCP2551 is CAN transceiver.
It may take a while to get used to MCP2515. Here are several links that are useful for getting started:
MCP2515 Linux Device Driver (probably for Raspberry Pi)
- http://clientes.netvisao.pt/anbadeol/mcp2515.html
- https://github.com/msperl/mcp2515
- http://lnxpps.de/rpie/mcp2515_mod.c
Arduino Example Sketch
https://gist.github.com/rechargecar/4177820



