MIDI メッセージの解析をするのに MIDI-OX は非常に強力なソフトウェアです。MIDI 信号を再現するために、受けた信号を記録することもできるのですが、やり方が少しわかりにくいのでこの記事に書き留めておきます。以下の手順で .mid ファイルを作ることができます。
1. Input Monitor を開く
開かなくても記録はできるんですがモニタを開いておくと受けたメッセージが見られるので作業が楽です。メニューの
View-> Input Monitor…
から開けます。
2. モニタを開始する
Actions -> Start Display
で開始します。ついでに SysEx も受け付けるようにしておくと解析にはよいかもしれません。
Options -> Pass SysEx
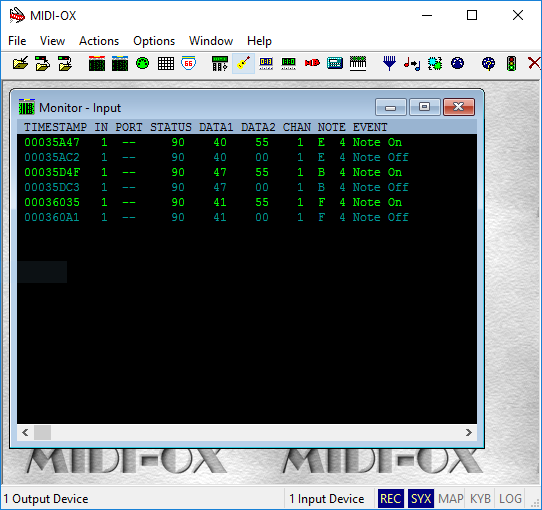
3. 試しに MIDI メッセージを入れてみる
以下のような画面になるはずです。右下の REC と SYX というボックスが紺色に反転していることが重要です。
4. 記録を開始する
モニタ画面を右クリックして “Clear Input” を選ぶと画面がクリアされます。クリアしたら記録を開始します。
File -> Log
を選んで、ログファイルダイアログを呼び出し、以下のように内容を変更します。
- Enable Logging を入れる
- Log Format を “MIDI to Text” にする
- Log File の拡張子を .mtx に変える

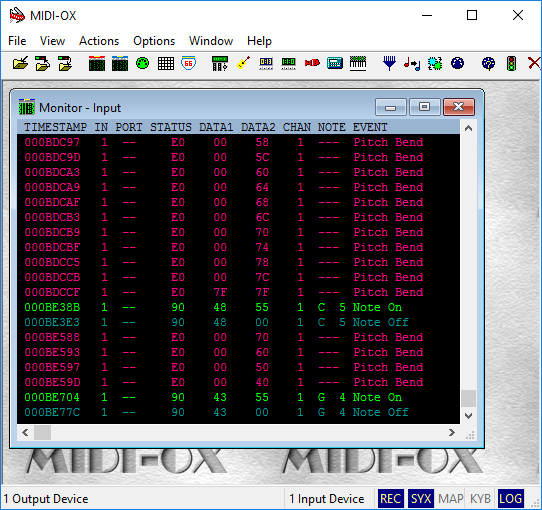
OK ボタンを押すと記録が開始されます。再度何か入力を入れると、以下のような画面になります。右下の LOG ボックスが紺色に反転していることが重要です。
5. 記録を終了する
画面右下の LOG ボックスをクリックするか、File -> Log… ダイアログで Enable Logging を外して OK ボタンを押すと記録が終了します。記録開始時に指定した .mtx ファイルが生成されます。
6. .mtx ファイルを .mid ファイルに変換する
Mtx2Midi というツールを使います。MIDI-OX のページ
に行って、Mtx2Midi-Installer.zip というリンクを探してインストールします。インストール後、生成した .mtx ファイルを右クリックして “Convert to MIDI file” を選ぶと変換した .mid ファイルが同じフォルダに作られます。


![DSC02699[1]](https://gaje.jp/blog/wp-content/uploads/2016/06/DSC026991-300x225.jpg)
![DSC02700[1]](https://gaje.jp/blog/wp-content/uploads/2016/06/DSC027001.jpg)