
1. Enabled CAN at 1Mbps on BeagleBone:
Following operations seem to be necessary every BeagleBone boot. TBD to setup auto configuration on startup.
root@beaglebone:~# echo BB-DCAN1 > /sys/devices/platform/bone_capemgr/slots
root@beaglebone:~# ip link set can0 up type can bitrate 500000
root@beaglebone:~# ip link set can0 up type can bitrate 1000000
root@beaglebone:~# ifconfig can0
can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
UP RUNNING NOARP MTU:16 Metric:1
RX packets:2 errors:0 dropped:2 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:16 (16.0 B) TX bytes:0 (0.0 B)
Interrupt:192
root@beaglebone:~# ip -d -s link show can0
4: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UNKNOWN mode DEFAULT group default qlen 10
link/can promiscuity 0
can state ERROR-ACTIVE (berr-counter tx 0 rx 127) restart-ms 0
bitrate 1000000 sample-point 0.750
tq 83 prop-seg 4 phase-seg1 4 phase-seg2 3 sjw 1
c_can: tseg1 2..16 tseg2 1..8 sjw 1..4 brp 1..1024 brp-inc 1
clock 24000000
re-started bus-errors arbit-lost error-warn error-pass bus-off
0 0 0 1 1 0
RX: bytes packets errors dropped overrun mcast
16 2 0 2 0 0
TX: bytes packets errors dropped carrier collsns
0 0 0 0 0 0
2. Wired CAN ports
Used MCP2551 for CAN transceiver.
Pin 24 -> CAN RX Pin 26 -> CAN TX Pin 2 -> GND Pin 6 -> VDD 5V
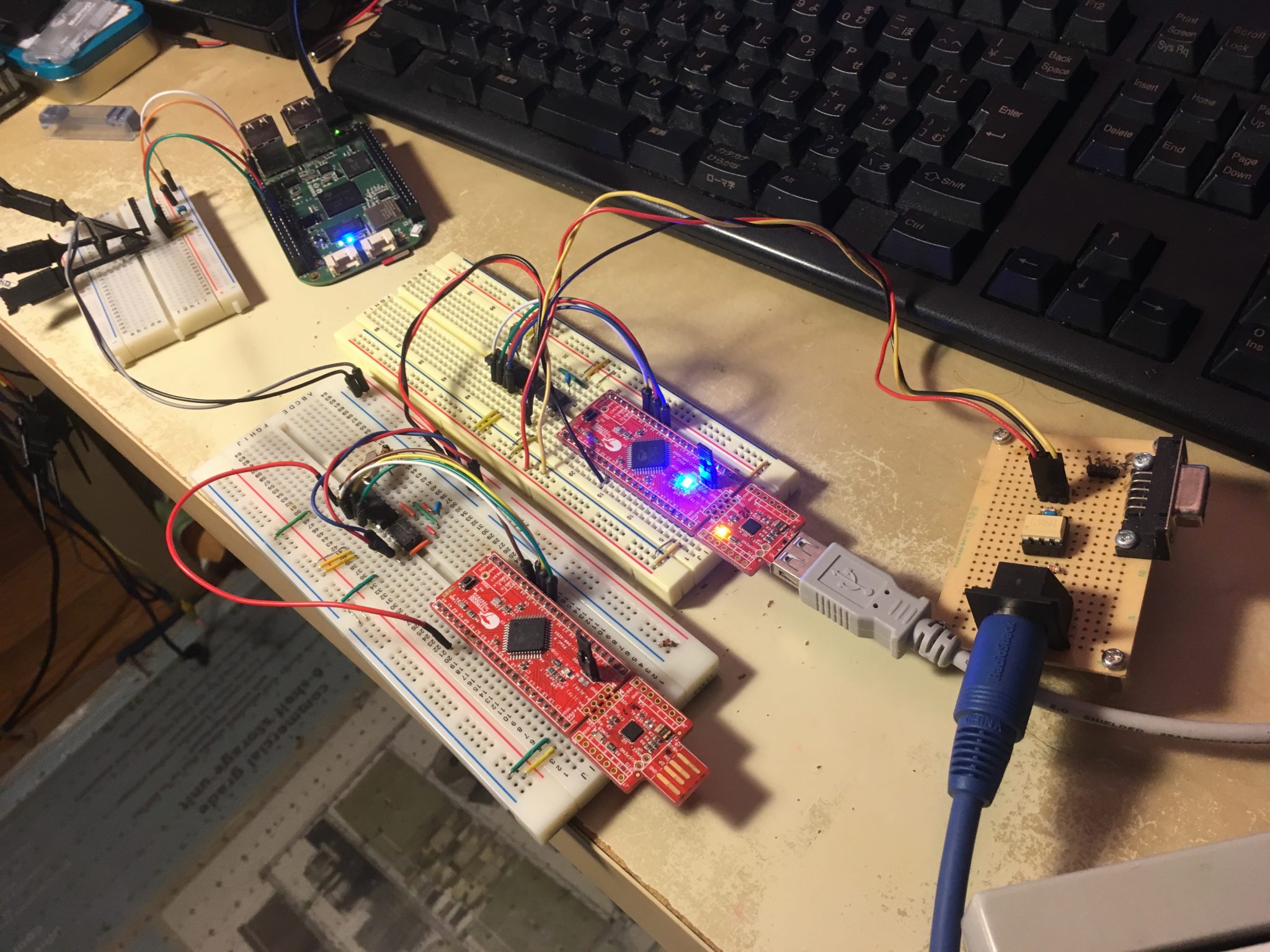
3. Connected with MIDI/CAN converter via CAN bus
See the picture above.
4. Monitor MIDI/CAN converter via serial interface
naoki-macbook:~ naoki$ screen /dev/tty.usbmodem14244421
5. Monitor packets on BeagleBone and play
root@beaglebone:~# candump can0 can0 100 [3] 09 4A 46 can0 100 [3] 08 4A 00
Serial port monitor:
note on [ 01 00] 4a note off [ 01 00] 4a

